[汽车之家 行业] 5月底,第四届未来汽车先行者大会正式开幕。本届大会以“拾级”为题,汇聚全球汽车产业的核心决策者和先行者、前沿科技领袖、学术权威、投资先锋,围绕汽车科技与产品创新、产业生态发展趋势、智能驾驶商业化应用、中国汽车国际化发展等话题展开深度探讨和前瞻激辩。
在本届大会现场,元戎启行创始人兼CEO周光发表了演讲。他在演讲中表示,过去五年,辅助驾驶技术的发展,由小模型主导。不少企业辅助驾驶性能的提升越来越慢,最根本的原因就在于小模型技术到达发展边界。想要在当前辅助驾驶能力的基础上再踏上下一个台阶,需要技术范式跃迁至以大模型为代表的基于认知的辅助驾驶技术。
周光认为,小模型更高擅长条件反射、局部特征响应,大模型则在全局认知、高级思维里明显优于小模型。在他看来,将Driver(驾驶者)+Analyst(分析者)+Critc(评判者)三种角色的能力集中于基座模型,能让辅助驾驶在开发、迭代、运营等所有环节都享受到数据飞轮的优势,让数据效率提升10倍,还能让更多人工环节被模型能力替代,最终推动辅助驾驶真正从可用走向好用、常用、安全。

以下为演讲实录(汽车之家精编):
大家好!我是元戎启行的CEO周光,今天我要分享的主题是大模型范式下的辅助驾驶的演进。
这几年,行业讨论的内容一直在变化。尤其是智驾这个行业,从2023年讨论端到端再到2025年的VLA模型,到今天越来越讨论大模型、基座模型、物理AI。在这个背景下,大家是很容易困惑的。今天我会跟大家讲讲,我们对于物理AI基座模型的思考,尤其是大模型的范式下。因为大模型已经不再是一个神秘的东西,大家每天都在用,像豆包、千问等等,已经深入到我们的生活。
在过去几年,行业在小模型的基础上,提升是越来越慢的,尤其是进入今年,你会发现整个辅助驾驶性能的提升越来越慢,其实最根本的原因还是在于小模型的边界已经触底了。现在投入越来越多,提升越来越慢。这其实也是原有的技术路线到了能力的上限,接近天花板。怎么样在今天的辅助驾驶技术的基础上进入下一个台阶?我认为是技术范式的跃迁。这就是以大模型为代表、基于认知的辅助驾驶技术。
小模型的现象,我们内部也有一个形象的比喻叫“跷跷板效应”。在小模型的系统里,当一个版本解决了一些问题,比如针对上海、武汉等城市做了特调,可能就在深圳、广州、北京变差了,也会引入一些新的问题。这样反反复复的版本之间的跷跷板和修改,在行业里是非常普遍的,这也是用户很难长期信任这个系统的原因。就像今天我用车,可能我今天在拥堵路上表现很好,可能明天我去郊游时在山路上的表现就非常差,这也影响了用户长期的信任,影响了辅助驾驶的持续使用。
回过头看过去五年,整个来看就是小模型的主导期,从一开始多个模块的辅助驾驶系统到24年的端到端,合并到25年的一个小模型,小模型的阶段已经持续了5年,26年到今天,行业的认知已经到了大模型时期,越来越多公司提出了物理AI的概念。本质上来讲,大模型使整个智驾进入Scaling的阶段。

什么是大模型?大模型不是更大的小模型,整个大模型是有一整套技术栈、网络结构、训练方式、模式的变化,是有一整套的技术逻辑,不是你把小模型的参数变大10倍就是大模型了。举一个例子,像小模型和大模型在认知层面会有什么区别,比如你有一只狗,你把这只狗染上了斑马的条纹,你给小模型的时候,它会认为这是一只斑马。但是对于一个人,染了斑马条纹的狗还是狗,大模型会更倾向于认为这样的情况是一只狗。所以你可以看到大模型在全局认知、高级思维里是明显优于小模型,小模型是擅长条件反射、局部特征响应。大模型是擅长高级的认知,当辅助驾驶从一开始的能激活,到了今天城市里面能做到几十公里的安全接管,再往上就触达到高级认知理解,触达到高级的大模型领域了,你要想让辅助驾驶的体验更上一个台阶,希望它能够像人一样进行整体的判断、更泛化的能力,这其实必须得是基于整套大模型能力,整个系统从执行系统升级到认知系统。
元戎已经开始真正用大模型的范式去解决辅助驾驶Scaling的问题,这里有两个,一个是模型的Scaling,一个是数据的Scaling。在模型方面我们有一个40B的基座模型,提升整个决策能力。我们有一个统一的Driver+Analyst+Critc三种能力,我们的基座模型覆盖了整个辅助驾驶的开发、迭代、整个公司的运营环节。另外一个就是数据的Scaling。本质上来讲,一个基座能力是有三个模型共同承担的,你可以认为一个模型,三种能力,之前的小模型只做到driver的板块,就是你有一个视频片段进去,然后有一系列的询问。在基座模型的领域里,不仅是要有driver的能力,还要有 Analyst能力,你还有一个Critic,这些都是集中在基座模型里。当你部署在车端上的时候,它进行蒸馏,当你在公司数据挖掘过程中,它充当了评判标准,把所有能力集中在一个基座模型里,让你整个公司里的每个环节都能享受数据飞轮、认知的提升。
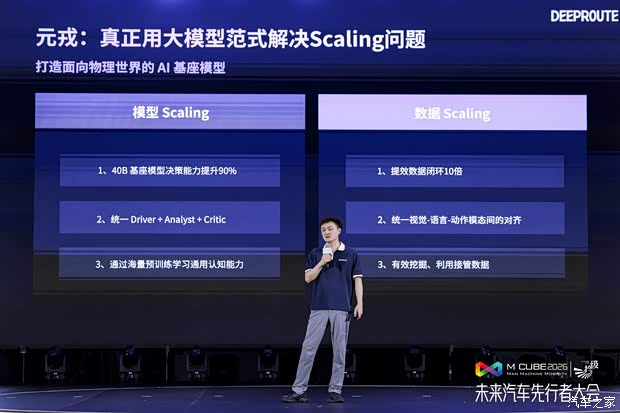
这实际上就是一个基座模型。在过去,传统的数据闭环里都大量依赖人工,没有基座模型之前,这些部分都是人工做的。但是有了基座模型之后,数据效率增加了十倍,另外是这些人工环节都可以由模型来自动完成,这也是非常关键。
2025年,元戎市占率同比增长是2.1倍,是行业第一。我们在2025年的时候第三方NOA市场份额已经达到了24%,位居行业第二。这也意味着元戎的城市NOA方案被越来越多的车企和用户选择,而且在今年这个阶段,每新增3台车就有1台是来自元戎,今年我们的订单量是非常大的。
2026年我们即将迈向一个新的发展阶段:在规模化发展落地方面,我们要做到的是超过100万台车辆的交付;在安全能力上面,我们希望引入基座模型之后,MPCI可以超过1000公里,不仅仅只是今天这种几十公里在城市里的表现,是能够在城市场景里达到千公里级,持续提升系统的稳定和安全表现。同时,有了1000公里城市MPCI的辅助驾驶,可以让用户的高频使用比例超过50%,也许可以开启一个全新的模式。
我们看到,特斯拉的FSD现在已经没有买断了,最新都是月付的模式。在这个基础上,还可以达到超过50%的人使用,就是因为整个安全系数上到了一个台阶,在城市里面达到了千公里级的安全接管,基本上可以做到月级才有一次安全接管,让辅助驾驶真正从可用变成好用、常用、安全。
过去一年,行业里更多的讨论到物理AI,尤其是今年春节之后,各家车企都在提。对元戎来讲,我们在2024年底就提出了物理AI这件事。在2025年3月份,我们明确定义,元戎是一家物理AI的公司。2025年3月份的GTC大会,我们也公开展示了我们的物理AI进展,2025年8月份我们召开了VLA的发布会,今年GTC我们展示了在物理AI的基座模型。未来我希望元戎不仅是物理AI的引领者,而更能成为物理AI的基础设施,让AI能够理解世界真正走向参与世界、改变世界。
以上是我今天的分享。